Because we all have to start somewhere ! So here it is, my very first attempt at building a robot. I was waiting for transistors from China because I needed those to control the motors. They arrived in the mail this morning from Shenzen and at 6$ for 10 pieces of 21 values, I’m pretty satisfied.





So what about the robot ? I’m going to try to keep it simple for a first. So a two-wheeled wall avoiding robot should be fine. I have a sonic sensor at hand for the wall avoiding part, and candle-holding plastic thingies will do the trick as for the wheels (yeah it’s a low-budget kind of robot).
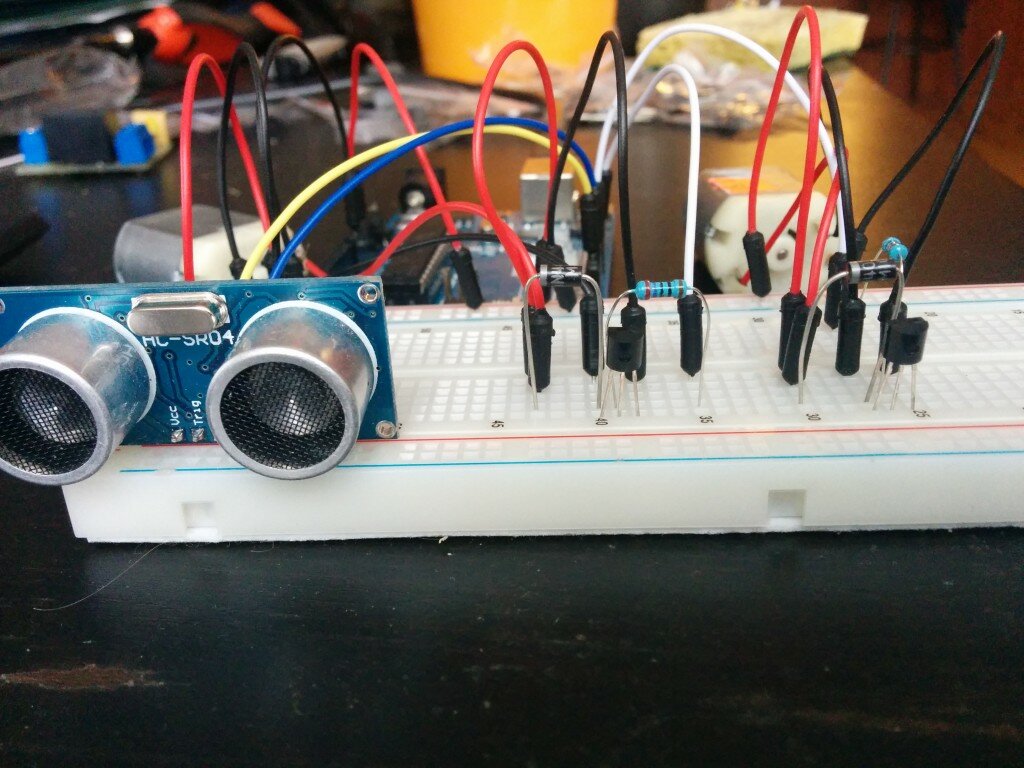
The prototype worked fine was a good way to start : the speed of the motors is proportional to the distance measured by the sensor.



So did it work ? The answer is no. At the time I didn’t know much about torque, the necessity of gears retro-control and such. Which led me to order a a complete chassis instead.


The parts :
- 1 arduino uno
- 2 270 ohms resistors
- 2 2N3904 transistors
- 2 small DC motors
- 1 ultrasonic ranging detector
- jumper wires
The code I used can be found here.